
Afin d’aborder les moteurs électriques sans trop de difficultés, nous allons commencer par une largeintroduction puis on traitera l’aspect multi-domaine. L’article suivant traitera de la machine synchrone.
Introduction
Tout d’abord, on défini le moteur électrique comme un système permettant d’effectuer un mouvement physique (rotation, translation, ascension, etc) à partir d’une énergie électrique. Ce processus est également réversible et peut servir à produire de l’électricité.
Ensuite, retenons que le moteur électrique est composé d’un stator et d’un rotor. Ainsi, le stator est la partie fixe (sur l’illustration à droite) et le rotor est la partir mobile (sur l’illustration à gauche). La partie rotative (ou rotor) tourne généralement dans la partie fixe (ou stator).
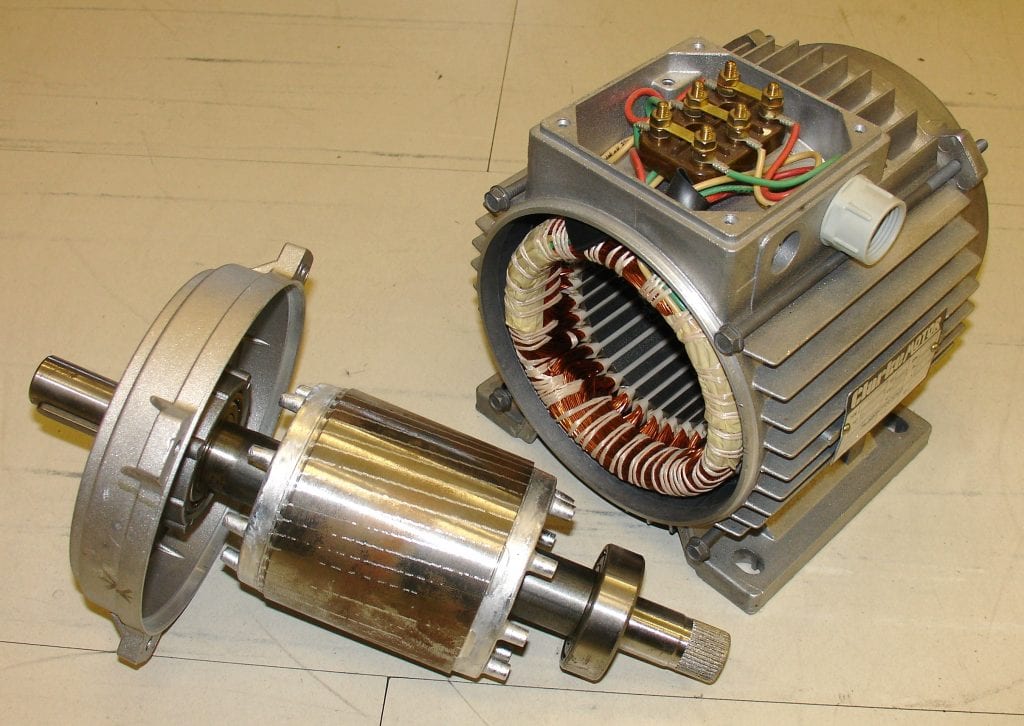
On retrouve ce genre de configuration dans les pompes et les moteurs par exemple.
Les moteurs électriques peuvent être alimenté par du monophasé, triphasé ou bien du continu.
En effet, dans la création de couple sur les moteurs électriques, on retrouve deux grandes catégories :
- Couple Synchrone
- Moteurs Synchrones (Moteur sans collecteur)
- Moteurs à Collecteur
- Moteurs Asynchrones (Moteurs à Induction)
- Couple Réluctant (machines à réluctance variable)
Contexte économique
Ensuite, le marché européen compte environ 10 à 15 millions de moteurs électriques vendus par an avec une évolution de 5 % par an en chiffre d’affaire. On retrouve notamment ces moteurs dans les secteurs de :
- L’électroménager :
- Moteurs asynchrones,
- Universels et
- Synchrones.
- L’automobile (50 % des recettes) :
- Moteurs à collecteur – entre 10 et 100 par véhicule : démarreurs, ventilateurs, moteur thermique et habitacle, essuie-glace avant et arrière, lève vitres, mais aussi alternateur, etc…
- L’horlogerie,
- L’informatique,
- La domotique,
- La photographie,
- La hifi,
- Les jouets,
- etc…
De même, l’atout majeur des moteurs électriques est qu’ils ont une large gamme de puissance, allant de quelques mW (horlogerie) à plusieurs MW (propulsion navale).
Il est également important de noter que beaucoup de nouvelles normes sont mises en vigueur afin d’avoir unrendement électrique supérieur aux moteurs précédents.
Également, les marchés grandissants comme le renouvelable font partie intégrante du marché économique des moteurs électriques car ils permettent leur développement au cours du temps. Les moteurs électriques sont donc une solution viable à long terme.
Contexte environnemental
Les moteurs électriques représentant près de 71 % de la consommation électrique industrielle, c’est donc une part énorme.
L’utilisation des moteurs électriques nécessite un coût, ainsi, la somme investit au cours de la vie de celui-ci représente :
- 2,5 % coût d’achat,
- 1,5 % coût de maintenance
- 96 % coût d’exploitation (électricité consommée)
Les moteurs électrique sont catégorisés suivant des classes IE représentant les différents niveaux de rendement tel que :
- IE1 = rendement niveau STANDARD
- IE2 = rendement niveau HAUT
- IE3 = rendement niveau PREMIUM
En outre, depuis le 1er janvier 2017, les moteurs de 750 W à 375 kW de classe IE3 (ou IE2 couplé avec un variateur) doivent avoir un rendement qui respecte ce graphique :

Source : http://new.abb.com
De même, le rendement des moteurs n’est pas le même suivant son alimentation :
- 25 à 40 % de rendement pour les moteurs thermiques,
- 50 à 75 % de rendement pour les machines monophasés et
- 80 à 95 % de rendement pour les machines triphasées.
Un moteur quel qu’il soit doit également avoir un rapport massique (rapport poids/puissance) important afin d’avoir le meilleur rendement possible.
Approche multi-domaines
Les moteurs électriques se déclinent sous quatre différents (mais complémentaires) domaines. On parle d’aspect mécanique, thermique, électrique mais aussi magnétique.
Aspect mécanique
La partie mécanique du moteur comprend notamment la vitesse de rotation de celui-ci et le couple sur l’arbre défini comme étant l’effort en rotation appliqué à celui-ci par deux forces égales de sens contraire.
Selon le principe fondamental de la dynamique qui est, rappelons le :
Soit un corps de masse m constante, l’accélération subie par un corps dans un référentiel galiléen est proportionnelle à la résultante des forces qu’il subit, et inversement proportionnelle à sa masse m.
Il intervient donc ici :
- Le rotor et la charge entrainée formant un moment d’inertie J,
- Le couple moteur C et
- Le couple résistant Cr.
Il en découle donc,

Ensuite, il est important de retenir que lorsqu’on a un régime permanent, c’est-à-dire lorsque la vitesse du moteur est constante, le couple moteur est égal au couple résistant (C = Cr).
De même, le moment d’inertie d’un cylindre plein homogène est J = 0,5mR2.
Aspect thermique
Pour ce qui est de l’aspect thermique, il est nécessaire de s’intéresser au cyclage thermique du moteur. En effet, le cyclage thermique « consiste à faire osciller la température d’un échantillon entre deux limites fixées ». Ainsi, cela permet d’étudier en laboratoire le comportement d’éléments combustibles.
La puissance d’un moteur dépend aussi des conditions de fonctionnement en température et en altitude. Par exemple :
- A 40° C et à 1 000 m d’altitude, un moteur de 1 kW peut fournir 1 kW en continu.
- A 40° C et à 3 000 m d’altitude, un moteur de 1 kW ne peut fournir que 0,85 kW. Pour un besoin de 1 kW utile, il faut donc choisir un moteur de 1/0,85 = 1,18 kW.
- A 20° C et à 1 000 m d’altitude, un moteur de 1 kW peut fournir jusqu’à 1,07 kW. Pour un besoin de 1 kW utile, on pourra donc choisir un moteur de 1/1,07 = 0,93 kW (plus petit), à condition qu’il vérifie toutes les autres conditions de fonctionnement.

Source : www.bts-electrotechnique.fr/
Aspect électrique
On décline l’aspect électrique suivant les grandeurs qui permettent de le dimensionner :
- La puissance P en W
- La tension d’alimentation V/U en V
- Le courant nominal I en A
Mais également suivant son modèle électrique qui est un circuit RL où l’inductance modélise le rotor (partie mobile). Le modèle électrique permet entre autre de prédire le comportement du moteur en question suivant des simulations par exemple mais aussi de stabiliser et d’améliorer la réaction du système par rapport à sa commande (aspect asservissement/commande).

Aspect magnétique
Enfin, l’aspect fondamental est bel et bien l’aspect magnétique, c’est le principe de base du fonctionnement des moteurs électriques : le champ magnétique.
Par contre, il existe également des moteurs électrostatiques, ce sont des micromoteurs, donc des moteurs dont la taille est de l’ordre de 100 μm. Ils ont la particularité d’utiliser les lois de l’électrostatique contrairement aux moteurs électriques qui utilisent les lois électromagnétiques.
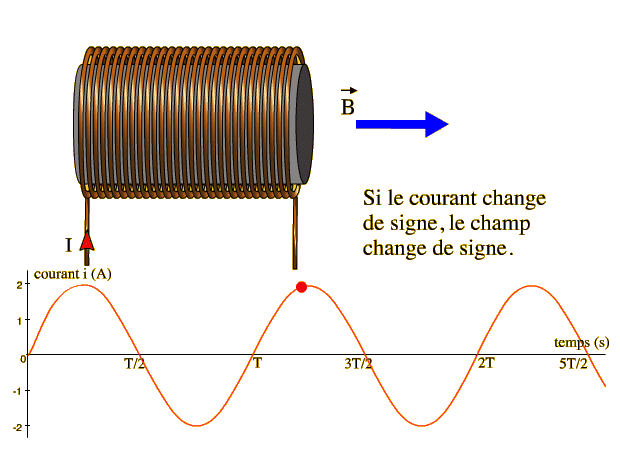
Prenons par exemple une bobine de cuivre alimentée par un courant électrique :

Source : https://sti2d.ecolelamache.org/
En effet, le courant électrique créé un champ magnétique B dans la bobine, il s’exprime en Tesla (T). De même, le courant électrique et la champ magnétique sont proportionnels. Le signe du champ dépend donc du signe du courant électrique.
Source : https://sti2d.ecolelamache.org/

Source : https://sti2d.ecolelamache.org/
Théorème de Leblanc
Le théorème de Lablanc énonce qu’un champ magnétique sinusoïdal alternatif de direction fixe est décomposable en champs qui tournent en sens inverse et d’amplitude
.

Source : http://restez-branches.navyc.fr

Théorème de Ferraris
Le théorème de Ferraris énonce que lorsque bobines décalées de
dans l’espace parcourues par des courants déphasés de
, il y a création d’un champ magnétique tournant unique.
Après avoir vue l’illustration des champs tournants issus d’une grandeur monophasée (théorème de Leblanc), voyons l’illustration d’un champ tournant à partir de deux grandeurs diphasées :

Source : http://restez-branches.navyc.fr

Source : Cours Introductions sur les moteurs – Champs tournants Licence EEA,
……………Lionel Laudebat – Maîtres de conférences et chercheurs (LAPLACE) Université Paul Sabatier

0 commentaires